еӣ жҮүз„Ўдәәж©ҹиЎЁжј”дәӢж•…й »еӮіпјҢзҫҺеңӢйә»зңҒзҗҶе·ҘеӯёйҷўпјҲMITпјүе·ҘзЁӢеңҳйҡҠй–ӢзҷјеҮәдёҖеҘ—е…Ёж–°зҡ„иЁ“з·ҙж–№жі•пјҢеҸҜзўәдҝқз„Ўдәәж©ҹгҖҒж©ҹеҷЁдәәе’ҢиҮӘ駕и»ҠзӯүеӨҡж©ҹеҷЁдәәзі»зөұпјҲmultiagent systemsпјүеңЁж“Ғж“ з’°еўғдёӯе®үе…ЁйҒӢдҪңгҖӮ
з ”з©¶еңҳйҡҠе·ІжҲҗеҠҹи®“е°ҸеһӢз„Ўдәәж©ҹеңЁйЈӣиЎҢдёӯе®ҢжҲҗдҪҚзҪ®дәӨжҸӣпјҢз”ҡиҮіиғҪеӨ йҷҚиҗҪеңЁз§»еӢ•дёӯзҡ„и»ҠијӣдёҠгҖӮжӣҙйҮҚиҰҒзҡ„жҳҜпјҢйҖҷй …жҠҖиЎ“еңЁжЁЎж“¬жё¬и©ҰдёӯиӯүеҜҰеҸҜж“ҙеұ•иҮіж•ёеҚғеҸ°з„Ўдәәж©ҹзҡ„еӨ§иҰҸжЁЎзі»зөұгҖӮ
йЎӣиҰҶеӮізөұи·Ҝеҫ‘иҰҸеҠғпјҢеүөж–°иЁ“з·ҙж–№жі•ејӯиЈң 3 зјәй»һ
MIT иҲӘеӨӘе·ҘзЁӢеүҜж•ҷжҺҲ Chuchu Fan иЎЁзӨәпјҢйҖҷй …жҠҖиЎ“еҸҜдҪңзӮәд»»дҪ•йңҖиҰҒеӨҡж©ҹеҷЁдәәеҚ”еҗҢйҒӢдҪңзҡ„жҮүз”ЁжЁҷжә–пјҢеҢ…жӢ¬еҖүе„Іж©ҹеҷЁдәәгҖҒжҗңж•‘з„Ўдәәж©ҹе’ҢиҮӘ駕и»ҠзӯүпјҢзӮәжҜҸеҖӢж©ҹеҷЁдәәжҸҗдҫӣе®үе…ЁйҳІиӯ·ж©ҹеҲ¶пјҢеңЁеҹ·иЎҢд»»еӢҷжҷӮе‘ҠиЁҙж©ҹеҷЁеҰӮдҪ•дҝқйҡңе®үе…ЁгҖӮ
гҖҠInteresting EngineeringгҖӢе ұе°ҺпјҢеңЁеӮізөұзҡ„еӨҡж©ҹеҷЁдәәзі»зөұйҖІиЎҢе®үе…ЁиЁӯиЁҲпјҢйҖҡеёёйңҖиҰҒйҖІиЎҢиӨҮйӣңзҡ„и·Ҝеҫ‘иҰҸеҠғпјҢе·ҘзЁӢеё«еҝ…й ҲиҖғж…®жҜҸеҖӢж©ҹеҷЁдәәиҲҮе…¶д»–ж©ҹеҷЁдәәд№Ӣй–“еҸҜиғҪзҡ„и·Ҝеҫ‘й—ңдҝӮгҖӮйҖҷзЁ®ж–№жі•дёҚеғ…иҖ—жҷӮдё”йңҖиҰҒеӨ§йҮҸйҒӢз®—иіҮжәҗпјҢд№ҹз„Ўжі•е®Ңе…Ёзўәдҝқе®үе…ЁжҖ§гҖӮиҲүдҫӢдҫҶиӘӘпјҢжҜҸжһ¶з„Ўдәәж©ҹйҒөеҫӘй җе®ҡзҡ„и·Ҝеҫ‘пјҢе°ҮжІ’жңүеӣ жҮүжҪӣеңЁж„ҸеӨ–зҡ„з©әй–“гҖӮ
зӣёијғд№ӢдёӢпјҢMIT еңҳйҡҠжҢҮеҮәпјҢе…¶ж–№жі•еҸӘйңҖе°ҲжіЁж–је°‘ж•ёж©ҹеҷЁдәәпјҢе°ұиғҪз”ўз”ҹзІҫзўәзҡ„е®үе…ЁеҚҖеҹҹпјҢдёҰдё”еҸҜж“ҙеұ•иҮіжӣҙеӨ§иҰҸжЁЎзҡ„зі»зөұгҖӮ
еғҸдәәйЎһжҶ‘зӣҙиҰәйҒҝй–ӢйҡңзӨҷзү©пјҢй—ңйҚөжҠҖиЎ“жҳҜ GCBF+
йҖҷд»Ҫз ”з©¶зҡ„е…ұеҗҢдҪңиҖ…гҖҒMIT з ”з©¶з”ҹ Oswin So и§ЈйҮӢпјҢж–°зі»зөұзҡ„йҒӢдҪңж–№ејҸйЎһдјјдәәйЎһеңЁж“Ғж“ зҡ„иіјзү©дёӯеҝғиө°еӢ•пјҢеҸӘйңҖй—ңжіЁе‘ЁеңҚ 5 е…¬е°әе…§зҡ„дәәзҫӨе°ұиғҪе®үе…ЁйҖҡиЎҢгҖӮи©Із ”з©¶е°Һе…Ҙ GCBF+пјҲGraph Control Barrier Functionпјүж–№жі•пјҢпјҢйҖҸйҒҺиЁҲз®—жҜҸеҖӢж©ҹеҷЁдәәзҡ„ж„ҹжё¬еҚҠеҫ‘е’Ңж©ҹжў°йҷҗеҲ¶дҫҶ模擬其移еӢ•зӢҖжіҒпјҢйҖІиҖҢе»әз«Ӣе®үе…Ёе°ҺиҲӘжҢҮд»ӨгҖӮ
當ж©ҹеҷЁдәә移еӢ•жҷӮпјҢзі»зөұжңғж №ж“ҡе‘ЁеңҚз’°еўғжҢҒзәҢиӘҝж•ҙе®үе…ЁеҚҖеҹҹпјҢи®“ж©ҹеҷЁдәәз„ЎйңҖеҡҙж јзҡ„и·Ҝеҫ‘иҰҸеҠғе°ұиғҪе®үе…Ёе®ҢжҲҗд»»еӢҷпјҢйҖҷиҲҮдәәйЎһжҶ‘зӣҙиҰәйҒҝй–ӢйҡңзӨҷзү©зҡ„ж–№ејҸйЎһдјјгҖӮ
Chuchu Fan еј·иӘҝпјҢйҖҷеҘ—жҺ§еҲ¶зі»зөұе…·жңүеҚіжҷӮеҸҚжҮүиғҪеҠӣпјҢдёҚйңҖиҰҒй җе…ҲиҰҸеҠғи·Ҝеҫ‘гҖӮзі»зөұжңғжҢҒзәҢжҺҘ收жңүй—ңж©ҹеҷЁдәәдҪҚзҪ®гҖҒйҖҹеәҰзӯүиіҮиЁҠпјҢеҚіжҷӮиӘҝж•ҙиЎҢеӢ•ж–№жЎҲгҖӮ當жғ…жіҒзҷјз”ҹи®ҠеҢ–жҷӮпјҢзі»зөұд№ҹиғҪз«ӢеҚіеҒҡеҮәиӘҝж•ҙд»Ҙзўәдҝқе®үе…ЁгҖӮ
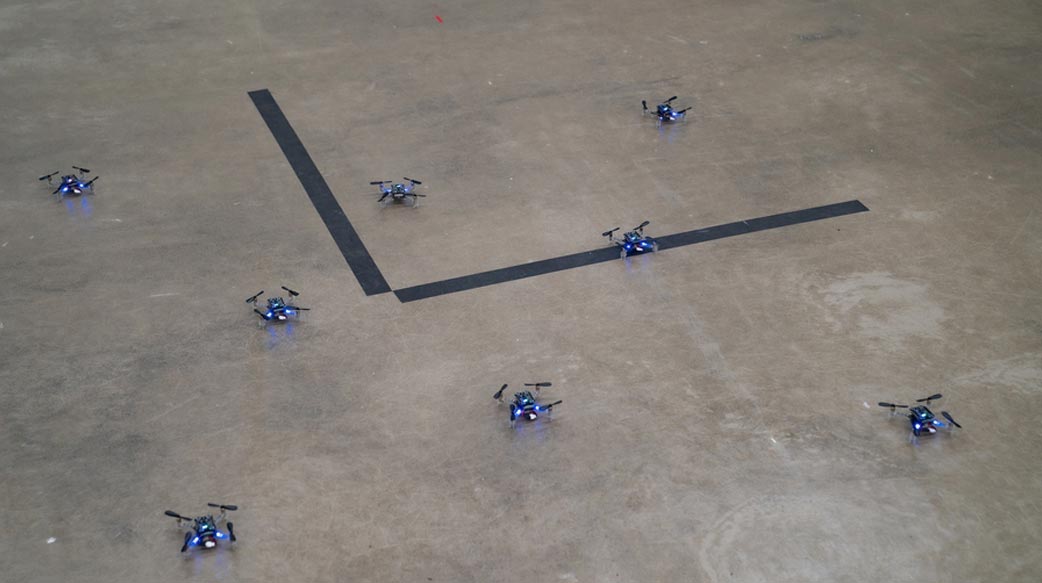
з ”з©¶еңҳйҡҠдҪҝз”Ёе…«еҸ° Crazyflie е°ҸеһӢеӣӣж—Ӣзҝјз„Ўдәәж©ҹйҖІиЎҢжё¬и©ҰпјҢи®“е®ғеҖ‘еңЁз©әдёӯдәӨжҸӣдҪҚзҪ®гҖӮжё¬и©ҰзөҗжһңйЎҜзӨәпјҢеҰӮжһңжІ’жңүжҺЎз”Ё GCBF+ ж–№жі•е°Үжңғе°ҺиҮҙзў°ж’һпјҢдҪҶ經йҒҺиЁ“з·ҙеҫҢз„Ўдәәж©ҹиғҪеӨ еҚіжҷӮиӘҝж•ҙйЈӣиЎҢи·Ҝеҫ‘пјҢдҝқжҢҒеңЁе®үе…ЁеҚҖеҹҹе…§йҒҝе…Қзў°ж’һгҖӮ
Chuchu Fan иЎЁзӨәпјҢгҖҢдҪҝз”ЁжҲ‘еҖ‘зҡ„жЎҶжһ¶пјҢжҲ‘еҖ‘еҸӘйңҖиҰҒзөҰз„Ўдәәж©ҹжҢҮе®ҡзӣ®зҡ„ең°пјҢиҖҢдёҚжҳҜж•ҙеҖӢз„Ўзў°ж’һи»Ңи·ЎпјҢз„Ўдәәж©ҹе°ұеҸҜд»ҘиҮӘе·ұжүҫеҲ°еҰӮдҪ•еңЁдёҚзҷјз”ҹзў°ж’һзҡ„жғ…жіҒдёӢеҲ°йҒ”зӣ®зҡ„ең°гҖӮгҖҚ
жң¬ең–/ж–Үз”ұгҖҢTechorange科жҠҖе ұж©ҳгҖҚжҺҲж¬ҠеҲҠзҷ»пјҢйқһ經еҗҢж„ҸдёҚеҫ—д»»ж„ҸиҪүијүгҖӮ
еҺҹж–ҮеҮәиҷ•пјҡдёҚз”Ёе…Ҳ幫ж©ҹеҷЁдәәеҠғи·Ҝз·ҡпјҒMIT ж–°иЁ“з·ҙж–№жі•еҸҜеҗҢжҷӮжҺ§еҲ¶ж•ёеҚғжһ¶з„Ўдәәж©ҹ


