杜克大學(Duke University)研究團隊開發出一套新型機器人系統,顛覆過去以模仿人類外型為主的設計思維,改追求「無論朝哪個方向,都能維持同樣移動能力」的設計概念。為了實現這項概念,研究人員模擬超過 1,500 種機器人配置,從中找出最接近理論性能極限的方案,最終誕生的機器人名為 Argus。
有別傳統機器人設計,Argus 以特殊結構提升移動效率
研究團隊指出,這種跳脫傳統的機器人結構,讓 Argus 能在不同地形中維持穩定且高效率的移動表現,也更能勝任複雜的空間操作。其核心關鍵,在於團隊提出的一套名為動態等向性(dynamic isotropy)的數學設計概念。這項指標會以 0 到 1 分來衡量機器人在各個方向上的運動能力是否均衡;分數越高,代表機器人無論朝哪個方向移動,都能維持接近一致的加速度、穩定性與操控表現。
目前多數機器人系統,包括先進四足機器人、人形機器人與傳統無人機,在這項指標上的表現通常不到 0.6;而 Argus 則達到 0.91,已相當接近理論極限。根據《Interesting Engineering》報導,高度對稱的設計,不僅提升了機器人的移動協調性,也在軌跡控制、能源效率、容錯能力、系統穩定性,以及複雜地形導航等面向帶來更好的表現。這套原理未來也有機會成為評估各類機器人性能的通用架構。
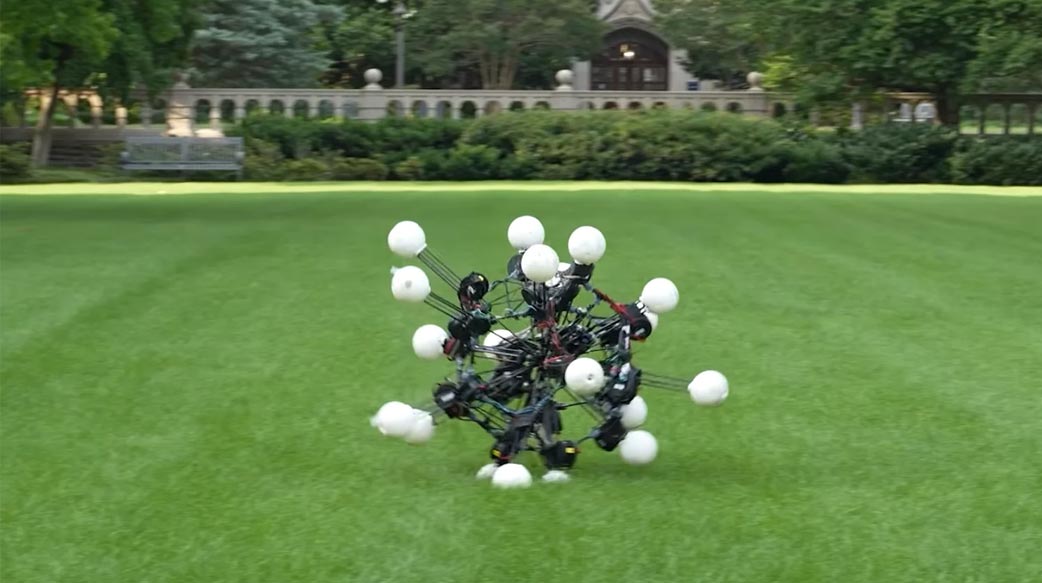
相較於過去偏重模仿人類外觀的設計思維,Argus 更強調運動能力與感知系統的整合。整套系統結合全身驅動與感知概念,使移動與環境偵測能同步協作。機器人本體由 20 條可模組化伸縮的機械腿組成,每條腿皆搭載深度攝影機,以放射狀方式環繞中央核心配置。這些機械腿依循正十二面體的幾何結構排列。正十二面體由 12 個五邊形面組成,能讓力量分布與視覺覆蓋更平均。Argus 不需要固定的前後方向,就能在任何方向維持平衡的加速度與穩定視野,在多變環境中保有高度機動性。
Argus 展現多方機動能力,能翻滾、爬牆和搬重物
《Interesting Engineering》提及,這套設計在實際測試中的表現相當突出。研究人員在杜克大學校園內,針對沙地、森林步道、草地、水泥地與濕滑路面等不同地形進行測試。結果顯示,Argus 幾乎不受朝向限制,能穩定穿越各種地面,甚至跨越高達 5 英吋(12.7 公分)的障礙物。即使遭到外力推擠,Argus 也能迅速恢復平衡;就算有三條機械腿失效,仍可持續移動,展現高度容錯與抗損能力。此外,它還能在接近最高速度的狀態下,搬運約 10 磅(4.5 公斤)的重量,同時維持穩定與機動性。
除了地面行走外,Argus 還具備攀爬垂直牆面的能力。它會透過不同腿部模組交替提供支撐與推進力,完成向上移動。研究團隊也展示,它能在持續翻滾移動的同時,穩定追蹤並推動一個邊長 3 英尺的立方體,顯示其在動態環境下,仍能有效整合感知與運動控制。值得注意的是,這些能力最初都是在模擬環境中完成訓練,再進一步轉移到真實世界應用,反映出整套設計架構具備高度泛化能力與穩定性。
領導這項研究、並主持杜克大學 General Robotics Lab 的 Boyuan Chen 表示:「當機器人在所有方向上都具備相同的加速能力時,它就不需要再以特定方向面對世界。」他也希望,這套原理未來能應用於搜救機器人、水下與空中載具,以及具備抓取能力的新型機器人系統。Boyuan Chen 舉例說,與其打造一隻模仿人類手掌的機械手,不如讓 Argus 本身就成為能從任意方向操作物體的「全向機械手」。他表示,這項研究真正重要的地方,不只是打造出一台特殊的機器人,而是提供一種不同於傳統仿生思維的新方向。
本圖/文由「Techorange科技報橘」授權刊登,非經同意不得任意轉載。
原文出處:誰說機器人一定要像人?杜克大學用「20足全向架構」顛覆仿生思維


